基本情報
この情報は 開放特許情報データベース を参照しています。
https://plidb.inpit.go.jp/ordinary/search/1
| 出願番号 | 特願2003-381774 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 出願日 | 2003/10/7 | ||||||||
| 出願人 | 長田 郁夫 | ||||||||
| 公開番号 | 特開2005-115883 | ||||||||
| 公開日 | 2005/4/28 特許第3882146号 | ||||||||
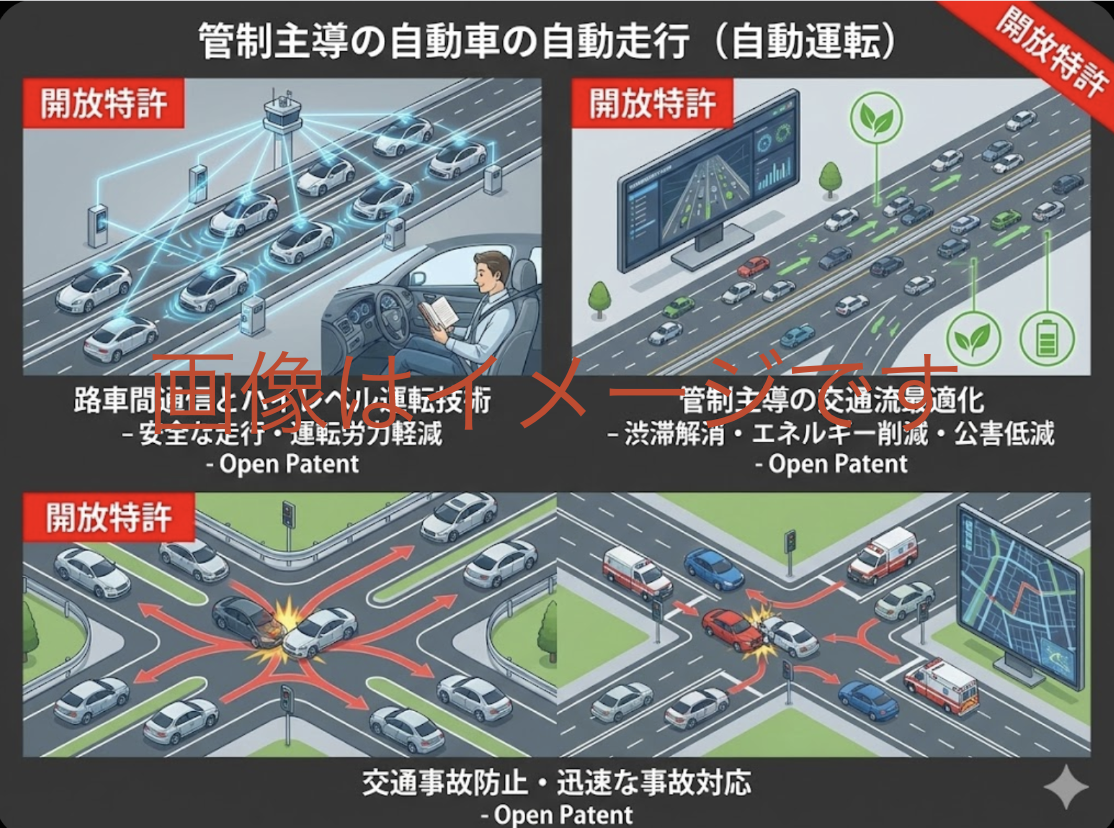
| 発明の名称 | 自動車の自動走行の方法 | ||||||||
| 技術分野 | 情報・通信 | ||||||||
| 機能 | 制御・ソフトウェア | ||||||||
| 適用製品 | 管制センター:管制コンピューター、管制卓・総合表示板、ITV遠方監視 道路:進路誘導レーン、情報伝送装置、狭域無線装置(路側) 車載器:自動走行コントロール・コンピューター、狭域無線装置(車側)、障害物検知レーザー | ||||||||
| 目的 | 自動車専用道路に管制主導の自動車の自動走行の技術を導入することにより、 次のような課題を解決する。ハイレベルの運転技術により 安全な走行 運転労力の軽減管制主導の走行により 交通事故の防止・削減 渋滞の解消 エネルギーの削減・公害の低減 事故対応の迅速化 |
||||||||
| 効果 | 効果の判断は、 従来の人による運転と比較して、AI・道路管制等による自動走行の導入が 上記課題をどれだけクリアーに出来るかということである。 実証は、実際に運用されての結果待ちということになるが、かなり期待ができる。 |
||||||||
| 技術概要 | 自動車専用道路全線に区間を設け、中央に設けた管制センターから各区間を走行する車両に対し狭域無線装置を介して走行条件(区間走行速度)を指令して自動走行させる技術 1 システム構成(添付イメージ1,2,3、参照)2 車両管制の方法 平常時の管制(添付イメージ4参照)a一般道路:管制コンピューターが車両の区間侵入を検知すると、前走車がこの区間に割り当てた区間走行速度で走行するように指令し、その区間を徐行Sとし一つ後の区間に低速L二つ後の区間に中速M三つ後の区間に高速Hをそれぞれの狭域無線装置に通達する bカーブ区間:カーブの入口区間に中速M中間区間に低速L出口区間に中速Mを割り当てる c分岐地点:運転者が車載器で設定した目的地に向かう進路を走行するよう指令する d合流地点:別々の車線を走ってきた車両が同一車線に合流する場合、各車両の相互位置を確認し先入り先出し、および待ち合わせのルールに従って交互に合流させる 異常時の管制:大渋滞、事故、道路不通、異常気象、設備故障、等の異常が発生した場合、管制コンピューターが自動的に又は管制員が管制指令卓から当該区間を走行する車両に対し、徐行、停止、待機、進路変更等を指令する。 |
||||||||
| 実施実績 | 【試作】 本特許の検証をITSシミュレーターで行った システムモデル(平常時) 道路:全長10km、1区間100m均一 車両:1000台 結果 全車両10kmを平均75km/hで走行 本手法による自動車の自動走行の実現を確認した |
||||||||
| 許諾実績 | 【無】 | ||||||||
| 特許権譲渡 | 【可】
|
||||||||
| 特許権実施許諾 | 【可】
|